导言:机械手是注塑自动化系统中的一个理要环节,可以有效的帮助企业提高企业的生产效率,降低生产成本。根据不同的自动化应用给不同的注塑 机选配合适的机械手是每个业务人员都应该常握的基本技能。本章将就思为客机械手的机型选配做个简单介绍。

注塑机机械手的选型的一般原则:
- 拿得到:由注塑机的型号大小决定,机械手的手臂长度要足够到模具中心点
- 取得出:由模具及产品形态尺寸判定,需要充分考虑开模行程及模内可移动空间及产品取出路径
- 放得下:由安全门高度及成品大小、承接台高度判定,确保手臂长度能够把产品平稳放置到承接台
- 拿得快:机械手要能够在一个注塑周期时间内完成产品的放置等动作并回到待机位。同等动作距离伺服电机比气缸耗时要短
- 选手臂:三板的模具选双臂(主副臂搭配),迭模选双主臂,两板模具选单臂
- 定截数:根据天车或车间的高度选定手臂的截数,同等行程条件下,双截手臂整体机器高度要低于单截手臂
- 配电机:对生产速度、位置精度和耐用性有要求的,需要在模具内做旋转动作的,可以选配四轴或五轴机械手
- 做治具:有冷却,剪水口,金属镶件等需求可以通过配合模具外治具系统完成
标准伺服机械手选型参数解读
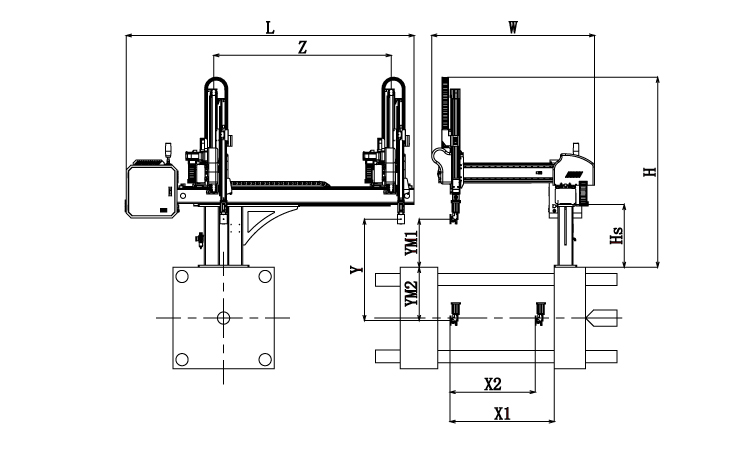
- L:机械手的机身长度
- Z:机械手的横行行程,指的是机械手从待机位到最远放置点的距离
- W:机械手的机身宽度
- H:机械手的机身高度
- Hs:机械手的安装底座高度
- YM1:机械手的待机位置到模板安装面的距离
- YM2:模板安装面到模具中心的距离
- Y:机械手的上下行程
- X2:机械手引拔行程(模内最大移动距离)
- X1:定模板到机械手的模内最远移动距离
机械手配机现场安装尺寸参数解读:
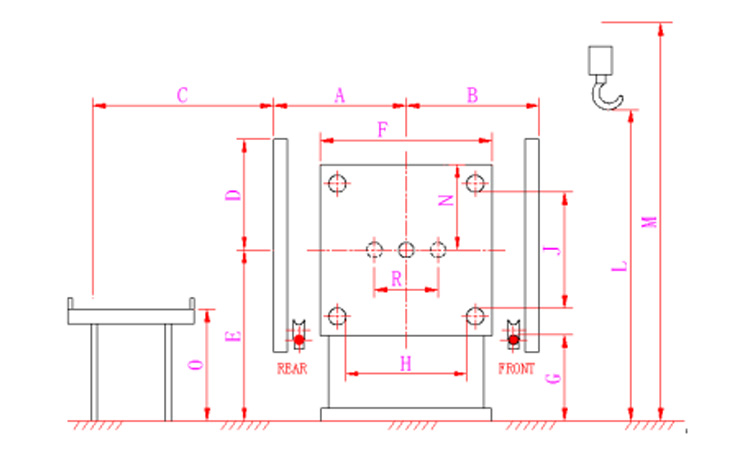
- A*:安全门到模板中心距离(反向)
- B*:安全门到模析中心距离(正向)
- C:安全门到产品置放的最远距离(反)
- D*:模板中心到安全门最高点的距离
- E*:模板中心到地面的距离
- F:模板宽度
- G:导向杆上面到地面的距离(IML必填
- H:模间柱距离(内宽)
- J:模间柱距离(内高)
- R:双色机两射嘴中心距离(双色机必填)
- L*:地板到天车的最低距离
- M:厂房高度
- N*:模板中心到模板上端距离
- O:产品置放的最低距离到地面
在实际的配机过程当中,除了注塑机本身的外形尺寸和车间高度之外,我们还要充分考虑车间的实际布局,避免出现因为两台注塑机之间间距过窄 而出现机械手之间互相干涉的情况;或者因为用户后端自动化系统采用了特殊高度的输送带而造成机械手在成功取到产品后无法把它平稳的放到输送带上的情况。 除了以上参数,在上取式机械手的选配过程中还应当注意需要找客户要注塑机的安装孔位图,以方便工程部为机械手配备合适的底座或者铁板完成机械手的安装作业。
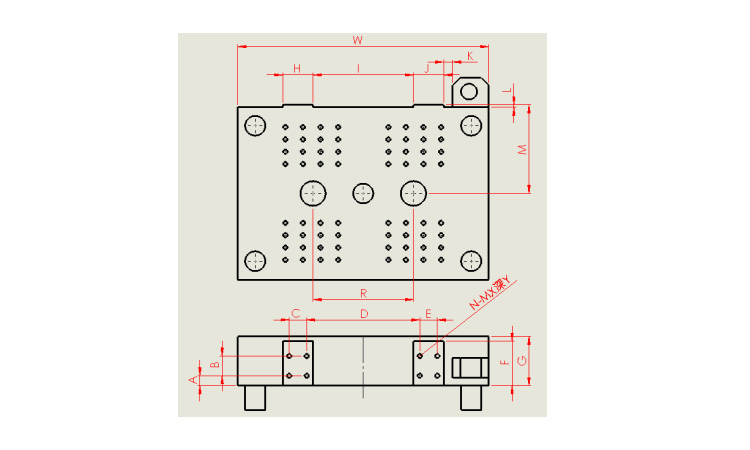
参数解读
- A*:模板安装面到安装孔距离
- B*:安装孔中心距离(纵向)
- C*安装孔中心距离(横向)
- D*:安装孔中心距离(内)
- E*:安装孔中心距离(横向)
- F:模板安装面到后端凸台宽度
- G:模板厚度
- H:凸台宽度
- I:凸台内宽
- J:凸台宽度
- K:凸台到接杆块距离
- L:凸台高度
- N*:安装螺丝孔个数
- MX*:安装螺丝孔大小
- Y:安装螺丝孔深度
- W:模板宽度
在机械手的选配过程中,除了基本的取件功能外,还需要充分了解客户是否存在潜在的自动化方案需求。如果有的话在配机的时候还要考虑到额外的治具负载需求及模内贴的额外开模行程需求。